 Platforma e-learningowa AVIACOM
Platforma e-learningowa AVIACOM
24 Kursy
Drony - Online
Kategoria Otwarta - A2 + TEST
Drony – Materiały szkoleniowe do kategorii OTWARTEJ A2
Przedstawiamy materiały szkoleniowe na podstawie Urzędu Lotnictwa Cywilnego dla OPERATORÓW Bezzałogowych Statków Powietrznych w kategorii OTWARTEJ A2
Cykl szkolenia online dla kategorii otwartej zaczniemy od informacji ogólnych i zbioru dobrych praktyk. Latanie bezzałogowym statkiem powietrznym, potocznie nazywanym dronem, to wielka przyjemność, ale również ogromna odpowiedzialność. Wzbijając się w powietrze, stajesz się uczestnikiem ruchu lotniczego. Jesteś pilotem, a każdy pilot musi dbać o bezpieczeństwo lotnicze. Zarówno w powietrzu, jak i na ziemi.
Krok po kroku…
W przypadku wykonywania lotów w kategorii OTWARTEJ masz kilka formalności do wypełnienia.
1. KONIECZNE - zarejestruj się na stronie Urzędu Lotnictwa Cywilnego https://drony.ulc.gov.pl i uzyskaj numer operatora oraz numer pilota:
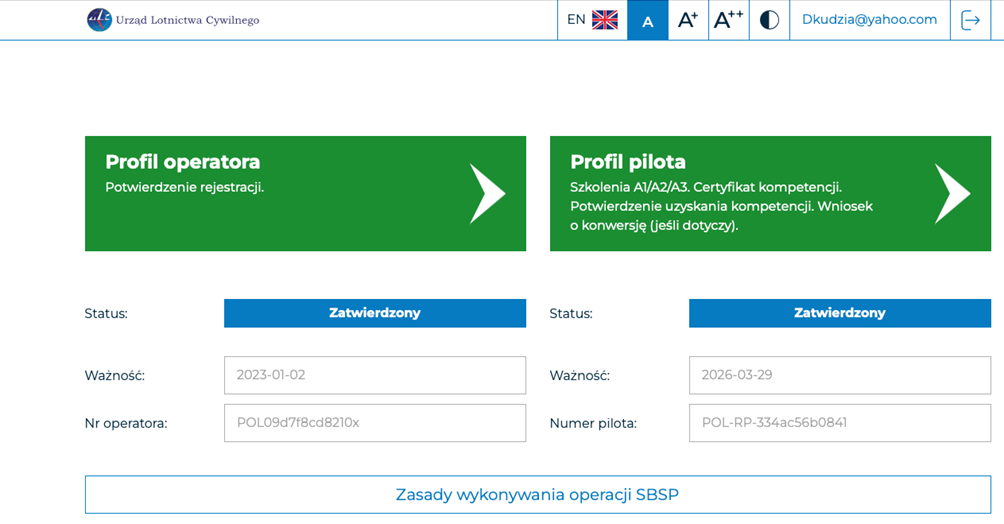
2. KONIECZNIE - Przejdź szkolenie A1/A3 i ukończ egzamin online na stronie https://drony.ulc.gov.pl:

3. Przejdź kurs teoretyczny A2, który dostępny będzie w Twoim profilu pilota ma stronie ULC lub na stronie Aviacom po wykupieniu egzaminu. Kurs oraz próbny test możesz przejść dowolną ilośc razy.
4. KONIECZNIE
złóż do Aviacom Project oświadczenie, na którym potwierdzasz, że:
I. Posiadasz aktualne kompetencje A1/A3.
II. Ukończyłeś szkolenie praktyczne w trybie samokształcenia.
5. Wybierasz termin egzaminu, umawiając się uprzednio telefonicznie lub mailowo.
6. Zdajesz egzamin A2. Aby zdać egzamin musisz spełnić następujące punkty:
I. Posiadać stałe łącze internetowe.
II. Mieć dowód osobisty przygotowany do weryfikacji (zasłonięte wszystkie informacje oprócz zdjęcia, imienia i nazwiska). Nagranie zostanie niezwłocznie usunięte, zgodnie z polityką RODO.
7. Po zdaniu egzaminu ośrodek szkolenia Aviacom Project przekazuje do ULC protokół z egzaminu oraz oświadczenie o ukończeniu szkolenia praktycznego
8. Kandydat otrzymuje certyfikat kompetencji pilota BSP uprawniający do lotów w podkategorii A2. Certyfikat pojawi się na profilu pilota - zaznaczony na zielono.
Jak Wygląda egzamin dla kompetencji A2?
- Egzamin przeprowadzamy w formie testu online, jednokrotnego wyboru, który składa się z 80 pytań.
- Na rozwiązanie testu jest 80 minut.
- Zaliczenie wymaga udzielenia minimum 75% prawidłowych odpowiedzi.
- Wynik egzaminu będzie dostępny po jego zakończeniu.
- Negatywny wynik egzaminu jest równoznaczny z koniecznością ponownego wykupienia dostępu do egzaminu.
- Egzamin odbywa się na platformie szkoleniowej i jest nagrywany w formie wideokonferencji, pod nadzorem wewnętrznym Aviacom Project, aby jego wynik był niepodważalny i jednoznaczny.
- Termin egzaminu ustalamy indywidualnie.
Zagadnienia do szkolenia w kategorii A2:
- Pogoda
- Rodzaje bezzałogowych konstrukcji
- Środek Ciężkości
- Zasilanie BSP
- Informacje ogólne
- GEOFENCE i GEOCAGE
Wstęp
Szkolenie do kategorii A2 ma charakter wyłącznie materiałów poglądowych. Obejmuje swoim zakresem zagadnienia wskazane w obowiązujących przepisach UE. Szkolenie nie jest obowiązkowe i możecie Państwo przyswoić poniższy zakres wiadomości, korzystając z dowolnych źródeł lub szkoleń dostępnych na rynku.
Obowiązkowy jest natomiast egzamin teoretyczny, który przeprowadzany będzie w podmiotach szkolących również w formie zdalnej.
Drony - Online
NSTS1
Krajowy Scenariusz Standardowy NSTS-01 dla operacji w zasięgu widoczności wzrokowej (VLOS) lub z widokiem z pierwszej osoby (FPV), wykonywanych z użyciem bezzałogowego statku powietrznego o masie startowej mniejszej niż 4 kg
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-01 VLOS lub z widokiem z pierwszej osoby FPV do 4kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (WYTYCZNE NR 15 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Loty w operacji NSTS-01
- w czasie lotu w operacjach VLOS, bezzałogowy statek powietrzny utrzymuje się w odległości do 120 m od najbliższego punktu powierzchni Ziemi; pomiar odległości dostosowuje się odpowiednio do cech geograficznych terenu, takich jak równiny, wzgórza, góry;
- w przypadku lotu bezzałogowym statkiem powietrznym w operacji VLOS, w odległości do 50 metrów w poziomie od sztucznej przeszkody o wysokości przekraczającej 105 metrów, maksymalną wysokość operacji można zwiększyć o maksymalnie 15 metrów powyżej wysokości przeszkody;
- w operacjach VLOS loty wykonuje się w zasięgu widoczności wzrokowej pilota lub przynajmniej jednego obserwatora, którzy utrzymują kontakt wzrokowy nieuzbrojonym okiem z bezzałogowym statkiem powietrznym w celu określenia jego położenia względem pilota i w przestrzeni powietrznej oraz zapewnienia bezpiecznej odległości od innych statków powietrznych, przeszkód, pojazdów, osób lub zwierząt;
- w operacjach VLOS wykonywanych bez obserwatora statku powietrznego, dopuszcza się utratę kontaktu wzrokowego z bezzałogowym statkiem powietrznym w momencie dokonywania przez pilota kontroli parametrów lotu przekazywanych przez urządzenia będące wyposażeniem bezzałogowego statku powietrznego;
- w operacjach VLOS wykonywanych z obserwatorem statku powietrznego, dopuszcza się, aby obserwator bezzałogowego statku powietrznego nie znajdował się bezpośrednio przy pilocie, jeżeli zapewniona jest dwukierunkowa łączność pomiędzy pilotem i obserwatorem oraz ustalono zasady komunikacji;
- w operacjach FPV lot jest wykonywany:
- do wysokości nie większej niż 50 m nad poziomem terenu,
- w odległości poziomej nie większej niż 500 m od operatora.
Jak to działa?
- Rejestrujesz się na naszej platformie e-learning'owej
- Wybierasz kurs,
- płacisz za kurs teoretyczny oraz egzamin,
- dostajesz dostęp do platformy e-learning'owej, materiałów video, prezentacji, materiałów dodatkowych oraz pytań kontrolnych,
- po ukończeniu kursu i zdaniu egzaminu wewnętrznego otrzymujesz certyfikat ukończenia szkolenia teoretycznego
- z naszej mapy (bazy) wybierasz sobie miejsce odbycia kursu praktycznego,
- po ukończeniu kursu praktycznego przystępujesz do egzaminu końcowego
- po skompletowaniu dokumentacji wysyłamy wszystko do ULC i otrzymujesz Świadectwo Kwalifikacji
Szkolenie z wiedzy teoretycznej trwa nie krócej niż 12 godzin.
Podczas tych 12 godzin przedstawimy tobie następujące zagadnienia:
- przepisy lotnicze,
- ograniczenia możliwości człowieka,
- procedury operacyjne,
- techniczne i operacyjne środki ograniczające ryzyko w powietrzu,
- ogólna wiedza na temat systemów bezzałogowych statków powietrznych,
- meteorologia,
- osiągi systemu bezzałogowego statku powietrznego w locie, oraz
- techniczne i operacyjne środki ograniczające ryzyko na ziemi.
Szczegółowy zakres szkolenia teoretycznego, praktycznego oraz wytyczne Prezesa ULC można znaleźć na plikach do ściągnięcia na naszej stronie DOKUMENTY
Drony - Online
NSTS2
Krajowy Scenariusz Standardowy NSTS-02 dla operacji w zasięgu widoczności wzrokowej (VLOS) z użyciem bezzałogowego statku powietrznego kategorii wielowirnikowiec (MR), o masie startowej mniejszej niż 25 kg
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-02 VLOS MR do 25kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (WYTYCZNE NR 16 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Loty w operacji NSTS-02
- w czasie lotu bezzałogowy statek powietrzny utrzymuje się w odległości do 120 m od najbliższego punktu powierzchni Ziemi; pomiar odległości dostosowuje się odpowiednio do cech geograficznych terenu, takich jak równiny, wzgórza, góry;
- w przypadku lotu bezzałogowym statkiem powietrznym w odległości do 50 metrów w poziomie od sztucznej przeszkody o wysokości przekraczającej 105 metrów, maksymalną wysokość operacji można zwiększyć o maksymalnie 15 metrów powyżej wysokości przeszkody;
- loty wykonuje się w zasięgu widoczności wzrokowej VLOS pilota lub przynajmniej jednego obserwatora, którzy utrzymują kontakt wzrokowy nieuzbrojonym okiem z bezzałogowym statkiem powietrznym w celu określenia jego położenia względem pilota i w przestrzeni powietrznej oraz zapewnienia bezpiecznej odległości od innych statków powietrznych, przeszkód, pojazdów, osób lub zwierząt;
- w operacjach VLOS wykonywanych bez obserwatora statku powietrznego, dopuszcza się utratę kontaktu wzrokowego z bezzałogowym statkiem powietrznym w momencie dokonywania przez pilota kontroli parametrów lotu przekazywanych przez urządzenia będące wyposażeniem bezzałogowego statku powietrznego;
- w operacjach VLOS wykonywanych z obserwatorem statku powietrznego, dopuszcza się aby obserwator bezzałogowego statku powietrznego nie znajdował się bezpośrednio przy pilocie, jeżeli zapewniona jest dwukierunkowa łączność pomiędzy pilotem i obserwatorem oraz ustalono zasady komunikacji.
Jak to działa?
- Rejestrujesz się na naszej platformie e-learning'owej
- Wybierasz kurs,
- płacisz za kurs teoretyczny oraz egzamin,
- dostajesz dostęp do platformy e-learning'owej, materiałów video, prezentacji, materiałów dodatkowych oraz pytań kontrolnych,
- po ukończeniu kursu i zdaniu egzaminu wewnętrznego otrzymujesz certyfikat ukończenia szkolenia teoretycznego
- z naszej mapy (bazy) wybierasz sobie miejsce odbycia kursu praktycznego,
- po ukończeniu kursu praktycznego przystępujesz do egzaminu końcowego
- po skompletowaniu dokumentacji wysyłamy wszystko do ULC i otrzymujesz Świadectwo Kwalifikacji
Szkolenie z wiedzy teoretycznej trwa nie krócej niż 12 godzin.
Podczas tych 12 godzin przedstawimy tobie następujące zagadnienia:
- przepisy lotnicze,
- ograniczenia możliwości człowieka,
- procedury operacyjne,
- techniczne i operacyjne środki ograniczające ryzyko w powietrzu,
- ogólna wiedza na temat systemów bezzałogowych statków powietrznych,
- meteorologia,
- osiągi systemu bezzałogowego statku powietrznego w locie, oraz
- techniczne i operacyjne środki ograniczające ryzyko na ziemi.
Szczegółowy zakres szkolenia teoretycznego, praktycznego oraz wytyczne Prezesa ULC można znaleźć na plikach do ściągnięcia na naszej stronie DOKUMENTY

Drony - Online
NSTS3
Krajowy Scenariusz Standardowy NSTS-03 dla operacji w zasięgu widoczności wzrokowej (VLOS) z użyciem bezzałogowych statków powietrznych kategorii stałopłat (A) o masie startowej mniejszej niż 25 kg
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-03 VLOS A - Stałopłat do 25kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (WYTYCZNE NR 17 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Loty w operacji NSTS-03
- w czasie lotu bezzałogowy statek powietrzny utrzymuje się w odległości do 120 m od najbliższego punktu powierzchni Ziemi; pomiar odległości dostosowuje się odpowiednio do cech geograficznych terenu, takich jak równiny, wzgórza, góry;
- w przypadku lotu bezzałogowym statkiem powietrznym w odległości do 50 metrów w poziomie od sztucznej przeszkody o wysokości przekraczającej 105 metrów, maksymalną wysokość operacji można zwiększyć o maksymalnie 15 metrów powyżej wysokości przeszkody;
- loty wykonuje się w zasięgu widoczności wzrokowej VLOS pilota lub przynajmniej jednego obserwatora, którzy utrzymują kontakt wzrokowy nieuzbrojonym okiem z bezzałogowym statkiem powietrznym w celu określenia jego położenia względem pilota i w przestrzeni powietrznej oraz zapewnienia bezpiecznej odległości od innych statków powietrznych, przeszkód, pojazdów, osób lub zwierząt;
- w operacjach VLOS wykonywanych bez obserwatora statku powietrznego, dopuszcza się utratę kontaktu wzrokowego z bezzałogowym statkiem powietrznym w momencie dokonywania przez pilota kontroli parametrów lotu przekazywanych przez urządzenia będące wyposażeniem bezzałogowego statku powietrznego;
- w operacjach VLOS wykonywanych z obserwatorem statku powietrznego, dopuszcza się aby obserwator bezzałogowego statku powietrznego nie znajdował się bezpośrednio przy pilocie, jeżeli zapewniona jest dwukierunkowa łączność pomiędzy pilotem i obserwatorem oraz ustalono zasady komunikacji.
Jak to działa?
- Rejestrujesz się na naszej platformie e-learning'owej
- Wybierasz kurs,
- płacisz za kurs teoretyczny oraz egzamin,
- dostajesz dostęp do platformy e-learning'owej, materiałów video, prezentacji, materiałów dodatkowych oraz pytań kontrolnych,
- po ukończeniu kursu i zdaniu egzaminu wewnętrznego otrzymujesz certyfikat ukończenia szkolenia teoretycznego
- z naszej mapy (bazy) wybierasz sobie miejsce odbycia kursu praktycznego,
- po ukończeniu kursu praktycznego przystępujesz do egzaminu końcowego
- po skompletowaniu dokumentacji wysyłamy wszystko do ULC i otrzymujesz Świadectwo Kwalifikacji
Szkolenie z wiedzy teoretycznej trwa nie krócej niż 12 godzin.
Podczas tych 12 godzin przedstawimy tobie następujące zagadnienia:
- przepisy lotnicze,
- ograniczenia możliwości człowieka,
- procedury operacyjne,
- techniczne i operacyjne środki ograniczające ryzyko w powietrzu,
- ogólna wiedza na temat systemów bezzałogowych statków powietrznych,
- meteorologia,
- osiągi systemu bezzałogowego statku powietrznego w locie, oraz
- techniczne i operacyjne środki ograniczające ryzyko na ziemi.
Szczegółowy zakres szkolenia teoretycznego, praktycznego oraz wytyczne Prezesa ULC można znaleźć na plikach do ściągnięcia na naszej stronie DOKUMENTY
Drony - Online
NSTS4
Krajowy Scenariusz Standardowy NSTS-04 dla operacji w zasięgu widoczności wzrokowej (VLOS) z użyciem bezzałogowych statków powietrznych kategorii helikopter (H), o masie startowej mniejszej niż 25 kg
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-04 VLOS H - Helikopter do 25kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (WYTYCZNE NR 18 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Loty w operacji NSTS-04
- w czasie lotu bezzałogowy statek powietrzny utrzymuje się w odległości do 120 m od najbliższego punktu powierzchni Ziemi; pomiar odległości dostosowuje się odpowiednio do cech geograficznych terenu, takich jak równiny, wzgórza, góry;
- w przypadku lotu bezzałogowym statkiem powietrznym w odległości do 50 metrów w poziomie od sztucznej przeszkody o wysokości przekraczającej 105 metrów, maksymalną wysokość operacji można zwiększyć o maksymalnie 15 metrów powyżej wysokości przeszkody;
- loty wykonuje się w zasięgu widoczności wzrokowej VLOS pilota lub przynajmniej jednego obserwatora, którzy utrzymują kontakt wzrokowy nieuzbrojonym okiem z bezzałogowym statkiem powietrznym w celu określenia jego położenia względem pilota i w przestrzeni powietrznej oraz zapewnienia bezpiecznej odległości od innych statków powietrznych, przeszkód, pojazdów, osób lub zwierząt;
- w operacjach VLOS wykonywanych bez obserwatora statku powietrznego, dopuszcza się utratę kontaktu wzrokowego z bezzałogowym statkiem powietrznym w momencie dokonywania przez pilota kontroli parametrów lotu przekazywanych przez urządzenia będące wyposażeniem bezzałogowego statku powietrznego;
- w operacjach VLOS wykonywanych z obserwatorem statku powietrznego, dopuszcza się aby obserwator bezzałogowego statku powietrznego nie znajdował się bezpośrednio przy pilocie, jeżeli zapewniona jest dwukierunkowa łączność pomiędzy pilotem i obserwatorem oraz ustalono zasady komunikacji.
Jak to działa?
- Rejestrujesz się na naszej platformie e-learning'owej
- Wybierasz kurs,
- płacisz za kurs teoretyczny oraz egzamin,
- dostajesz dostęp do platformy e-learning'owej, materiałów video, prezentacji, materiałów dodatkowych oraz pytań kontrolnych,
- po ukończeniu kursu i zdaniu egzaminu wewnętrznego otrzymujesz certyfikat ukończenia szkolenia teoretycznego
- z naszej mapy (bazy) wybierasz sobie miejsce odbycia kursu praktycznego,
- po ukończeniu kursu praktycznego przystępujesz do egzaminu końcowego
- po skompletowaniu dokumentacji wysyłamy wszystko do ULC i otrzymujesz Świadectwo Kwalifikacji
Szkolenie z wiedzy teoretycznej trwa nie krócej niż 12 godzin.
Podczas tych 12 godzin przedstawimy tobie następujące zagadnienia:
- przepisy lotnicze,
- ograniczenia możliwości człowieka,
- procedury operacyjne,
- techniczne i operacyjne środki ograniczające ryzyko w powietrzu,
- ogólna wiedza na temat systemów bezzałogowych statków powietrznych,
- meteorologia,
- osiągi systemu bezzałogowego statku powietrznego w locie, oraz
- techniczne i operacyjne środki ograniczające ryzyko na ziemi.
Szczegółowy zakres szkolenia teoretycznego, praktycznego oraz wytyczne Prezesa ULC można znaleźć na plikach do ściągnięcia na naszej stronie DOKUMENTY
Drony - Online
NSTS5
Krajowy Scenariusz Standardowy NSTS-05 dla operacji poza zasięgiem widoczności wzrokowej (BVLOS) z użyciem bezzałogowych statków powietrznych o masie startowej mniejszej niż 4 kg, w odległości nie większej niż 2 km od pilota bezzałogowego statku powietrznego
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-05 BVLOS BSP do 4kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (WYTYCZNE NR 19 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Loty w operacji NSTS-05
- w czasie lotu bezzałogowy statek powietrzny utrzymuje się w odległości do 120 m od najbliższego punktu powierzchni ziemi; pomiar odległości dostosowuje się odpowiednio do cech geograficznych terenu, takich jak równiny, wzgórza, góry;
- w przypadku lotu bezzałogowym statkiem powietrznym w odległości do 50 metrów w poziomie od sztucznej przeszkody o wysokości przekraczającej 105 metrów, maksymalną wysokość operacji można zwiększyć o maksymalnie 15 metrów powyżej wysokości przeszkody;
- operacje BVLOS w ramach NSTS-05 wykonuje się nie dalej niż 2 km w linii prostej od pilota.
Jak to działa?
- Rejestrujesz się na naszej platformie e-learning'owej
- Wybierasz kurs,
- płacisz za kurs teoretyczny oraz egzamin,
- dostajesz dostęp do platformy e-learning'owej, materiałów video, prezentacji, materiałów dodatkowych oraz pytań kontrolnych,
- po ukończeniu kursu i zdaniu egzaminu wewnętrznego otrzymujesz certyfikat ukończenia szkolenia teoretycznego
- z naszej mapy (bazy) wybierasz sobie miejsce odbycia kursu praktycznego,
- po ukończeniu kursu praktycznego przystępujesz do egzaminu końcowego
- po skompletowaniu dokumentacji wysyłamy wszystko do ULC i otrzymujesz Świadectwo Kwalifikacji
Szkolenie z wiedzy teoretycznej trwa nie krócej niż 16 godzin.
Podczas tych 16 godzin przedstawimy tobie następujące zagadnienia:
- przepisy lotnicze,
- ograniczenia możliwości człowieka,
- procedury operacyjne,
- techniczne i operacyjne środki ograniczające ryzyko w powietrzu,
- ogólna wiedza na temat systemów bezzałogowych statków powietrznych,
- meteorologia,
- osiągi systemu bezzałogowego statku powietrznego w locie, oraz
- techniczne i operacyjne środki ograniczające ryzyko na ziemi.
Szczegółowy zakres szkolenia teoretycznego, praktycznego oraz wytyczne Prezesa ULC można znaleźć na plikach do ściągnięcia na naszej stronie DOKUMENTY
Drony - Online
NSTS6
Krajowy Scenariusz Standardowy NSTS-06 dla operacji poza zasięgiem widoczności wzrokowej (BVLOS) z użyciem bezzałogowych statków powietrznych kategorii wielowirnikowiec (MR) o masie startowej mniejszej niż 25 kg, w odległości nie większej niż 2 km od pilota bezzałogowego statku powietrznego
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-06 BVLOS MR do 25kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (WYTYCZNE NR 20 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Loty w operacji NSTS-06
- w czasie lotu bezzałogowy statek powietrzny utrzymuje się w odległości do 120 m od najbliższego punktu powierzchni ziemi; pomiar odległości dostosowuje się odpowiednio do cech geograficznych terenu, takich jak równiny, wzgórza, góry;
- w przypadku lotu bezzałogowym statkiem powietrznym w odległości do 50 metrów w poziomie od sztucznej przeszkody o wysokości przekraczającej 105 metrów, maksymalną wysokość operacji można zwiększyć o maksymalnie 15 metrów powyżej wysokości przeszkody;
- operacje BVLOS w ramach NSTS-06 wykonuje się nie dalej niż 2 km w linii prostej od pilota.
Jak to działa?
- Rejestrujesz się na naszej platformie e-learning'owej
- Wybierasz kurs,
- płacisz za kurs teoretyczny oraz egzamin,
- dostajesz dostęp do platformy e-learning'owej, materiałów video, prezentacji, materiałów dodatkowych oraz pytań kontrolnych,
- po ukończeniu kursu i zdaniu egzaminu wewnętrznego otrzymujesz certyfikat ukończenia szkolenia teoretycznego
- z naszej mapy (bazy) wybierasz sobie miejsce odbycia kursu praktycznego,
- po ukończeniu kursu praktycznego przystępujesz do egzaminu końcowego
- po skompletowaniu dokumentacji wysyłamy wszystko do ULC i otrzymujesz Świadectwo Kwalifikacji
Szkolenie z wiedzy teoretycznej trwa nie krócej niż 16 godzin.
Podczas tych 16 godzin przedstawimy tobie następujące zagadnienia:
- przepisy lotnicze,
- ograniczenia możliwości człowieka,
- procedury operacyjne,
- techniczne i operacyjne środki ograniczające ryzyko w powietrzu,
- ogólna wiedza na temat systemów bezzałogowych statków powietrznych,
- meteorologia,
- osiągi systemu bezzałogowego statku powietrznego w locie, oraz
- techniczne i operacyjne środki ograniczające ryzyko na ziemi.
Szczegółowy zakres szkolenia teoretycznego, praktycznego oraz wytyczne Prezesa ULC można znaleźć na plikach do ściągnięcia na naszej stronie DOKUMENTY
Drony - Online
NSTS7
Krajowy Scenariusz Standardowy NSTS-07 dla operacji poza zasięgiem widoczności wzrokowej (BVLOS) z użyciem bezzałogowych statków powietrznych kategorii stałopłat (A) o masie startowej mniejszej niż 25 kg, w odległości nie większej niż 2 km od pilota bezzałogowego statku powietrznego
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-05 BVLOS A-Stałopłat do 25kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (WYTYCZNE NR 21 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Loty w operacji NSTS-07
- w czasie lotu bezzałogowy statek powietrzny utrzymuje się w odległości do 120 m od najbliższego punktu powierzchni ziemi; pomiar odległości dostosowuje się odpowiednio do cech geograficznych terenu, takich jak równiny, wzgórza, góry;
- w przypadku lotu bezzałogowym statkiem powietrznym w odległości do 50 metrów w poziomie od sztucznej przeszkody o wysokości przekraczającej 105 metrów, maksymalną wysokość operacji można zwiększyć o maksymalnie 15 metrów powyżej wysokości przeszkody;
- operacje BVLOS w ramach NSTS-05 wykonuje się nie dalej niż 2 km w linii prostej od pilota.
Jak to działa?
- Rejestrujesz się na naszej platformie e-learning'owej
- Wybierasz kurs,
- płacisz za kurs teoretyczny oraz egzamin,
- dostajesz dostęp do platformy e-learning'owej, materiałów video, prezentacji, materiałów dodatkowych oraz pytań kontrolnych,
- po ukończeniu kursu i zdaniu egzaminu wewnętrznego otrzymujesz certyfikat ukończenia szkolenia teoretycznego
- z naszej mapy (bazy) wybierasz sobie miejsce odbycia kursu praktycznego,
- po ukończeniu kursu praktycznego przystępujesz do egzaminu końcowego
- po skompletowaniu dokumentacji wysyłamy wszystko do ULC i otrzymujesz Świadectwo Kwalifikacji
Szkolenie z wiedzy teoretycznej trwa nie krócej niż 16 godzin.
Podczas tych 16 godzin przedstawimy tobie następujące zagadnienia:
- przepisy lotnicze,
- ograniczenia możliwości człowieka,
- procedury operacyjne,
- techniczne i operacyjne środki ograniczające ryzyko w powietrzu,
- ogólna wiedza na temat systemów bezzałogowych statków powietrznych,
- meteorologia,
- osiągi systemu bezzałogowego statku powietrznego w locie, oraz
- techniczne i operacyjne środki ograniczające ryzyko na ziemi.
Szczegółowy zakres szkolenia teoretycznego, praktycznego oraz wytyczne Prezesa ULC można znaleść na plikach do ściągnięcia na naszej stronie DOKUMENTY
Drony - Online
NSTS8
Krajowy Scenariusz Standardowy NSTS-08 dla operacji poza zasięgiem widoczności wzrokowej (BVLOS) z użyciem bezzałogowych statków powietrznych kategorii helikopter (H) o masie startowej mniejszej niż 25 kg, w odległości nie większej niż 2 km od pilota bezzałogowego statku powietrznego
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-05 BVLOS H-Helikopter do 25kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (WYTYCZNE NR 22 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Loty w operacji NSTS-08
- w czasie lotu bezzałogowy statek powietrzny utrzymuje się w odległości do 120 m od najbliższego punktu powierzchni ziemi; pomiar odległości dostosowuje się odpowiednio do cech geograficznych terenu, takich jak równiny, wzgórza, góry;
- w przypadku lotu bezzałogowym statkiem powietrznym w odległości do 50 metrów w poziomie od sztucznej przeszkody o wysokości przekraczającej 105 metrów, maksymalną wysokość operacji można zwiększyć o maksymalnie 15 metrów powyżej wysokości przeszkody;
- operacje BVLOS w ramach NSTS-05 wykonuje się nie dalej niż 2 km w linii prostej od pilota.
Jak to działa?
- Rejestrujesz się na naszej platformie e-learning'owej
- Wybierasz kurs,
- płacisz za kurs teoretyczny oraz egzamin,
- dostajesz dostęp do platformy e-learning'owej, materiałów video, prezentacji, materiałów dodatkowych oraz pytań kontrolnych,
- po ukończeniu kursu i zdaniu egzaminu wewnętrznego otrzymujesz certyfikat ukończenia szkolenia teoretycznego
- z naszej mapy (bazy) wybierasz sobie miejsce odbycia kursu praktycznego,
- po ukończeniu kursu praktycznego przystępujesz do egzaminu końcowego
- po skompletowaniu dokumentacji wysyłamy wszystko do ULC i otrzymujesz Świadectwo Kwalifikacji
Szkolenie z wiedzy teoretycznej trwa nie krócej niż 16 godzin.
Podczas tych 16 godzin przedstawimy tobie następujące zagadnienia:
- przepisy lotnicze,
- ograniczenia możliwości człowieka,
- procedury operacyjne,
- techniczne i operacyjne środki ograniczające ryzyko w powietrzu,
- ogólna wiedza na temat systemów bezzałogowych statków powietrznych,
- meteorologia,
- osiągi systemu bezzałogowego statku powietrznego w locie, oraz
- techniczne i operacyjne środki ograniczające ryzyko na ziemi.
Szczegółowy zakres szkolenia teoretycznego, praktycznego oraz wytyczne Prezesa ULC można znaleźć na plikach do ściągnięcia na naszej stronie DOKUMENTY
Drony - Online
NSTS9
NSTS-09 dla operacji poza zasięgiem widoczności wzrokowej (BVLOS) z użyciem bezzałogowych statków powietrznych o masie startowej mniejszej niż 25 kg, wykonywane przez operatorów systemów bezzałogowych statków powietrznych posiadających krajową zgodę na loty (BVLOS).
Cena: skontaktuj się z nami

Drony - Online
NSTS-1 English Course
NSTS-01
National Standard Scenario NSTS-01 for operations in the visual range (VLOS) or with the first person view (FPV) performed with an unmanned aerial vehicle with a take-off mass of less than 4 kg
Conforms to the European regulations of the EU
Training NSTS-01 VLOS or FPV with a first-person view up to 4 kg - the training is conducted using the e-learning method in accordance with the latest European regulations and the program approved by the Civil Aviation Office (GUIDANCE NO. 15 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Flights in operation NSTS-01
- during flight, the unmanned aerial vehicle is kept at a distance of up to 120 m from the nearest point of the Earth's surface; distance measurement is adapted to the geographical characteristics of the terrain such as plains, hills, mountains;
- when flying an unmanned aircraft up to 50 meters horizontally from an artificial obstacle with a height exceeding 105 meters, the maximum operating altitude may be increased up to 15 meters above the height of the obstacle;
- flights are performed within the visual range of the VLOS of the pilot or at least one observer who maintains eye contact with the unmanned aerial vehicle in order to determine its position in relation to the pilot and in the airspace and to ensure a safe distance from other aircraft, obstacles, vehicles, people or animals ;
- in VLOS operations without an aircraft observer, visual contact with the unmanned aircraft is permitted when the pilot checks the flight parameters transmitted by devices equipped with the unmanned aircraft;
- in VLOS operations with an aircraft observer, it is permissible for the UAS observer not to be in the immediate vicinity of the pilot if two-way communication between the pilot and the observer is ensured and communication rules have been established.
How it's working?
- register on our e-learning platform
- choose a course,
- pay for the theoretical course and exam,
- get access to the e-learning platform, video materials, presentations, additional materials and control questions,
- after completing the course and passing the internal examination, you receive a certificate of theoretical training completion
- from our map (base) you choose the place of the practical course,
- after completing the practical course, you take the final exam
- after completing the documentation, we send everything to the Civil Aviation Authority and you receive a Qualification Certificate
Theoretical knowledge training lasts no less than 12 hours.
During these 12 hours, we will present you the following topics:
- aviation regulations,
- limitations of human possibilities,
- operating procedures,
- technical and operational measures to reduce the risk in the air,
- general knowledge of unmanned aerial vehicle systems,
- meteorology,
- UAS flight performance, and
- technical and operational measures to reduce the risk on the ground.
The detailed scope of theoretical and practical training as well as the guidelines of the President of the Civil Aviation Authority can be found in the files for download on our website DOCUMENTS

Drony - Online
NSTS-2 English Course
NSTS-02
National Standard Scenario NSTS-02 for operations within the visual range (VLOS) with the use of a multi-rotor unmanned aerial vehicle (MR) with a take-off mass less than 25 kg
Conforms to the European regulations of the EU
NSTS-02 VLOS MR training up to 25 kg - the training is conducted using the e-learning method in accordance with the latest European regulations and the program approved by the Civil Aviation Office (GUIDANCE NO.16 OF THE PRESIDENT OF THE CIVIL AVAILABILITY of December 29, 2020)
Flights in operation NSTS-02
- during flight, the unmanned aerial vehicle is kept at a distance of up to 120 m from the nearest point of the Earth's surface; distance measurement is adapted to the geographical characteristics of the terrain such as plains, hills, mountains;
- when flying an unmanned aircraft up to 50 meters horizontally from an artificial obstacle with a height exceeding 105 meters, the maximum operating altitude may be increased up to 15 meters above the height of the obstacle;
- flights are performed within the visual range of the VLOS of the pilot or at least one observer who maintains eye contact with the unmanned aerial vehicle in order to determine its position in relation to the pilot and in the airspace and to ensure a safe distance from other aircraft, obstacles, vehicles, people or animals ;
- in VLOS operations without an aircraft observer, visual contact with the unmanned aircraft is permitted when the pilot checks the flight parameters transmitted by devices equipped with the unmanned aircraft;
- in VLOS operations with an aircraft observer, it is permissible for the UAS observer not to be in the immediate vicinity of the pilot if two-way communication between the pilot and the observer is ensured and communication rules have been established.
How it's working?
- register on our e-learning platform
- choose a course,
- pay for the theoretical course and exam,
- get access to the e-learning platform, video materials, presentations, additional materials and control questions,
- after completing the course and passing the internal examination, you receive a certificate of theoretical training completion
- from our map (base) you choose the place of the practical course,
- after completing the practical course, you take the final exam
- after completing the documentation, we send everything to the Civil Aviation Authority and you receive a Qualification Certificate
Theoretical knowledge training lasts no less than 12 hours.
During these 12 hours, we will present you the following topics:
- aviation regulations,
- limitations of human possibilities,
- operating procedures,
- technical and operational measures to reduce the risk in the air,
- general knowledge of unmanned aerial vehicle systems,
- meteorology,
- UAS flight performance, and
- technical and operational measures to reduce the risk on the ground.
The detailed scope of theoretical and practical training as well as the guidelines of the President of the Civil Aviation Authority can be found in the files for download on our website DOCUMENTS

Drony - Online
NSTS-3 English Course
NSTS-03
National Standard Scenario NSTS-03 for operations in the visual range (VLOS) with fixed-wing (A) unmanned aerial vehicles with a take-off mass less than 25 kg
Conforms to the European regulations of the EU
Training NSTS-03 VLOS A - Fixed-wing aircraft up to 25 kg - the training is conducted using the e-learning method in accordance with the latest European regulations and the program approved by the Civil Aviation Office (GUIDANCE NO. 17 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Flights in operation NSTS-03
- during flight, the unmanned aerial vehicle is kept at a distance of up to 120 m from the nearest point of the Earth's surface; distance measurement is adapted to the geographical characteristics of the terrain such as plains, hills, mountains;
- when flying an unmanned aircraft up to 50 meters horizontally from an artificial obstacle with a height exceeding 105 meters, the maximum operating altitude may be increased up to 15 meters above the height of the obstacle;
- flights are performed within the visual range of the VLOS of the pilot or at least one observer who maintains eye contact with the unmanned aerial vehicle in order to determine its position in relation to the pilot and in the airspace and to ensure a safe distance from other aircraft, obstacles, vehicles, people or animals ;
- in VLOS operations without an aircraft observer, visual contact with the unmanned aircraft is permitted when the pilot checks the flight parameters transmitted by devices equipped with the unmanned aircraft;
- in VLOS operations with an aircraft observer, it is permissible for the UAS observer not to be in the immediate vicinity of the pilot if two-way communication between the pilot and the observer is ensured and communication rules have been established.
How it's working?
- register on our e-learning platform
- choose a course,
- pay for the theoretical course and exam,
- get access to the e-learning platform, video materials, presentations, additional materials and control questions,
- after completing the course and passing the internal examination, you receive a certificate of theoretical training completion
- from our map (base) you choose the place of the practical course,
- after completing the practical course, you take the final exam
- after completing the documentation, we send everything to the Civil Aviation Authority and you receive a Qualification Certificate
Theoretical knowledge training lasts no less than 12 hours.
During these 12 hours, we will present you the following topics:
- aviation regulations,
- limitations of human possibilities,
- operating procedures,
- technical and operational measures to reduce the risk in the air,
- general knowledge of unmanned aerial vehicle systems,
- meteorology,
- UAS flight performance, and
- technical and operational measures to reduce the risk on the ground.
The detailed scope of theoretical and practical training as well as the guidelines of the President of the Civil Aviation Authority can be found in the files for download on our website DOCUMENTS

Drony - Online
NSTS-4 English Course
NSTS-04
National Standard Scenario NSTS-04 for operations in the visual range (VLOS) with helicopter (H) unmanned aerial vehicles with a take-off mass less than 25 kg
Conforms to the European regulations of the EU
Training NSTS-04 VLOS H - Helicopter up to 25 kg - the training is conducted using the e-learning method in accordance with the latest European regulations and the program approved by the Civil Aviation Authority (GUIDANCE NO. 18 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Flights in operation NSTS-01
- during flight, the unmanned aerial vehicle is kept at a distance of up to 120 m from the nearest point of the Earth's surface; distance measurement is adapted to the geographical characteristics of the terrain such as plains, hills, mountains;
- when flying an unmanned aircraft up to 50 meters horizontally from an artificial obstacle with a height exceeding 105 meters, the maximum operating altitude may be increased up to 15 meters above the height of the obstacle;
- flights are performed within the visual range of the VLOS of the pilot or at least one observer who maintains eye contact with the unmanned aerial vehicle in order to determine its position in relation to the pilot and in the airspace and to ensure a safe distance from other aircraft, obstacles, vehicles, people or animals ;
- in VLOS operations without an aircraft observer, visual contact with the unmanned aircraft is permitted when the pilot checks the flight parameters transmitted by devices equipped with the unmanned aircraft;
- in VLOS operations with an aircraft observer, it is permissible for the UAS observer not to be in the immediate vicinity of the pilot if two-way communication between the pilot and the observer is ensured and communication rules have been established.
How it's working?
- register on our e-learning platform
- choose a course,
- pay for the theoretical course and exam,
- get access to the e-learning platform, video materials, presentations, additional materials and control questions,
- after completing the course and passing the internal examination, you receive a certificate of theoretical training completion
- from our map (base) you choose the place of the practical course,
- after completing the practical course, you take the final exam
- after completing the documentation, we send everything to the Civil Aviation Authority and you receive a Qualification Certificate
Theoretical knowledge training lasts no less than 12 hours.
During these 12 hours, we will present you the following topics:
- aviation regulations,
- limitations of human possibilities,
- operating procedures,
- technical and operational measures to reduce the risk in the air,
- general knowledge of unmanned aerial vehicle systems,
- meteorology,
- UAS flight performance, and
- technical and operational measures to reduce the risk on the ground.
The detailed scope of theoretical and practical training as well as the guidelines of the President of the Civil Aviation Authority can be found in the files for download on our website DOCUMENTS

Drony - Online
NSTS-5 English Course
NSTS-05
National Standard Scenario NSTS-05 for operations out of the visual range (BVLOS) with unmanned aerial vehicles with a take-off mass of less than 4 kg, within a distance of not more than 2 km from the pilot of the unmanned aerial vehicle
Conforms to the European regulations of the EU
NSTS-05 BVLOS BSP training up to 4 kg - the training is conducted using the e-learning method in accordance with the latest European regulations and the program approved by the Civil Aviation Authority (GUIDANCE NO. 19 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Flights in operation NSTS-05
- during flight, the unmanned aerial vehicle shall be kept within 120 m from the nearest point of the earth's surface; distance measurement is adapted to the geographical characteristics of the terrain such as plains, hills, mountains;
- when flying an unmanned aircraft up to 50 meters horizontally from an artificial obstacle with a height exceeding 105 meters, the maximum operating altitude may be increased up to 15 meters above the height of the obstacle;
- BVLOS operations under NSTS-05 are performed no more than 2 km in a straight line from the pilot
How it's working?
- register on our e-learning platform
- choose a course,
- pay for the theoretical course and exam,
- get access to the e-learning platform, video materials, presentations, additional materials and control questions,
- after completing the course and passing the internal examination, you receive a certificate of theoretical training completion
- from our map (base) you choose the place of the practical course,
- after completing the practical course, you take the final exam
- after completing the documentation, we send everything to the Civil Aviation Authority and you receive a Qualification Certificate
Theoretical knowledge training lasts no less than 12 hours.
During these 12 hours, we will present you the following topics:
- aviation regulations,
- limitations of human possibilities,
- operating procedures,
- technical and operational measures to reduce the risk in the air,
- general knowledge of unmanned aerial vehicle systems,
- meteorology,
- UAS flight performance, and
- technical and operational measures to reduce the risk on the ground.
The detailed scope of theoretical and practical training as well as the guidelines of the President of the Civil Aviation Authority can be found in the files for download on our website DOCUMENTS

Drony - Online
NSTS-6 English Course
NSTS-06
National Standard Scenario NSTS-06 for operations out of the visual range (BVLOS) with the use of unmanned aerial vehicles of the multirotor category (MR) with a take-off mass less than 25 kg, within a distance of not more than 2 km from the pilot of the unmanned aerial vehicle
Conforms to the European regulations of the EU
Training NSTS-06 BVLOS MR up to 25 kg - the training is conducted using the e-learning method in accordance with the latest European regulations and the program approved by the Civil Aviation Authority (GUIDANCE NO. 20 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Flights in operation NSTS-06
- during flight, the unmanned aerial vehicle shall be kept within 120 m from the nearest point of the earth's surface; distance measurement is adapted to the geographical characteristics of the terrain such as plains, hills, mountains;
- when flying an unmanned aircraft up to 50 meters horizontally from an artificial obstacle with a height exceeding 105 meters, the maximum operating altitude may be increased up to 15 meters above the height of the obstacle;
- BVLOS operations under NSTS-06 are performed no more than 2 km in a straight line from the pilot
How it's working?
- register on our e-learning platform
- choose a course,
- pay for the theoretical course and exam,
- get access to the e-learning platform, video materials, presentations, additional materials and control questions,
- after completing the course and passing the internal examination, you receive a certificate of theoretical training completion
- from our map (base) you choose the place of the practical course,
- after completing the practical course, you take the final exam
- after completing the documentation, we send everything to the Civil Aviation Authority and you receive a Qualification Certificate
Theoretical knowledge training lasts no less than 12 hours.
During these 12 hours, we will present you the following topics:
- aviation regulations,
- limitations of human possibilities,
- operating procedures,
- technical and operational measures to reduce the risk in the air,
- general knowledge of unmanned aerial vehicle systems,
- meteorology,
- UAS flight performance, and
- technical and operational measures to reduce the risk on the ground.
The detailed scope of theoretical and practical training as well as the guidelines of the President of the Civil Aviation Authority can be found in the files for download on our website DOCUMENTS

Drony - Online
NSTS-7 English Course
NSTS-07
National Standard Scenario NSTS-07 for operations out of the visual range (BVLOS) with fixed-wing (A) unmanned aerial vehicles with a take-off mass less than 25 kg, within 2 km distance from the UAS pilot
Conforms to the European regulations of the EU
Training NSTS-07 BVLOS A-Fixed-wing up to 25 kg - the training is conducted using the e-learning method in accordance with the latest European regulations and the program approved by the Civil Aviation Authority (GUIDANCE NO. 21 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Flights in operation NSTS-07
- during flight, the unmanned aerial vehicle shall be kept within 120 m from the nearest point of the earth's surface; distance measurement is adapted to the geographical characteristics of the terrain such as plains, hills, mountains;
- when flying an unmanned aircraft up to 50 meters horizontally from an artificial obstacle with a height exceeding 105 meters, the maximum operating altitude may be increased up to 15 meters above the height of the obstacle;
- BVLOS operations under NSTS-05 are performed no more than 2 km in a straight line from the pilot
How it's working?
- register on our e-learning platform
- choose a course,
- pay for the theoretical course and exam,
- get access to the e-learning platform, video materials, presentations, additional materials and control questions,
- after completing the course and passing the internal examination, you receive a certificate of theoretical training completion
- from our map (base) you choose the place of the practical course,
- after completing the practical course, you take the final exam
- after completing the documentation, we send everything to the Civil Aviation Authority and you receive a Qualification Certificate
Theoretical knowledge training lasts no less than 12 hours.
During these 12 hours, we will present you the following topics:
- aviation regulations,
- limitations of human possibilities,
- operating procedures,
- technical and operational measures to reduce the risk in the air,
- general knowledge of unmanned aerial vehicle systems,
- meteorology,
- UAS flight performance, and
- technical and operational measures to reduce the risk on the ground.
The detailed scope of theoretical and practical training as well as the guidelines of the President of the Civil Aviation Authority can be found in the files for download on our website DOCUMENTS

Drony - Online
NSTS-8 English Course
NSTS-08
Krajowy Scenariusz Standardowy NSTS-08 dla operacji poza zasięgiem widoczności wzrokowej (BVLOS) z użyciem bezzałogowych statków powietrznych kategorii helikopter (H) o masie startowej mniejszej niż 25 kg, w odległości nie większej niż 2 km od pilota bezzałogowego statku powietrznego
Zgodny z przepisami Europejskimi EU
Szkolenie NSTS-05 BVLOS H-Helikopter do 25kg - szkolenie przeprowadzanie jest metodą e-learningu zgodnie z najnowszymi przepisami Europejskimi oraz programem zatwierdzonym przez Urząd Lotnictwa Cywilnego (GUIDANCE NO. 22 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 29 grudnia 2020 r.)
Flights in operation NSTS-08
- during flight, the unmanned aerial vehicle shall be kept within 120 m from the nearest point of the earth's surface; distance measurement is adapted to the geographical characteristics of the terrain such as plains, hills, mountains;
- when flying an unmanned aircraft up to 50 meters horizontally from an artificial obstacle with a height exceeding 105 meters, the maximum operating altitude may be increased up to 15 meters above the height of the obstacle;
- BVLOS operations under NSTS-08 are performed no more than 2 km in a straight line from the pilot
How it's working?
- register on our e-learning platform
- choose a course,
- pay for the theoretical course and exam,
- get access to the e-learning platform, video materials, presentations, additional materials and control questions,
- after completing the course and passing the internal examination, you receive a certificate of theoretical training completion
- from our map (base) you choose the place of the practical course,
- after completing the practical course, you take the final exam
- after completing the documentation, we send everything to the Civil Aviation Authority and you receive a Qualification Certificate
Theoretical knowledge training lasts no less than 12 hours.
During these 12 hours, we will present you the following topics:
- aviation regulations,
- limitations of human possibilities,
- operating procedures,
- technical and operational measures to reduce the risk in the air,
- general knowledge of unmanned aerial vehicle systems,
- meteorology,
- UAS flight performance, and
- technical and operational measures to reduce the risk on the ground.
The detailed scope of theoretical and practical training as well as the guidelines of the President of the Civil Aviation Authority can be found in the files for download on our website DOCUMENTS
Drony - Online
SORA - Zlecenie
SORA – Specific Operation Risk Assessment
Przeprowadzenie analizy - SORA - Specific Operation Risk Assessment
Na zlecenie wnioskodawcy przeprowadzany pełną analizę SORA
Czym jest SORA?
SORA jest ujednoliconym narzędziem do analizy ryzyka stosowanym dla kategorii szczególnej. Określa poziom oraz cele bezpieczeństwa na poziomie operacyjnym, które pozwala na przeprowadzenie ustandaryzowanej oceny planowanych operacji BSP.
Jest to metoda opracowana przez organizację JARUS, a następnie dostosowana do przepisów europejskich przez organizację EASA. Jest zatwierdzona przez Urząd Lotnictwa Cywilnego.
Analiza SORA składa się z dziesięciu etapów. Uwzględnia najważniejsze zagadnienia ze strony konieczności zdefiniowania profilu misji, oceny zagrożeń jakie mogą wystąpić na ziemi, w ruchu powietrznym oraz wyznacza poziom integralności operacji – SAIL, jak również definiuje cele bezpieczeństwa na poziomie operacyjnym, czyli OSO.
Ale zacznijmy od początku:
W zależności od poziomu ryzyka operacji lot bezzałogowym statkiem powietrznym może odbyć się w jednej z trzech kategorii, dla których zdefiniowano wymagania jakie powinni spełnić operatorzy oraz producenci. Istotne jest wyodrębnienie w przepisach europejskich i krajowych kategorii szczególnej, która wymaga zezwolenia przez odpowiedni organ nadzorujący.
Zgodnie z nowymi regulacjami (rozporządzenie wykonawcze Komisji UE 2019/947) operacje bezzałogowymi statkami powietrznymi (BSP) sklasyfikowane są w oparciu o ich stopień ryzyka:
- Najniższy – kategoria otwarta.
- Średni – kategoria szczególna.
- Najwyższy – kategoria certyfikowana.
W kategorii otwartej operacje wykonywane są tylko w zasięgu wzroku pilota lub obserwatora (VLOS), do maksymalnej wysokości 120 metrów, dronem o maksymalnej masie startowej do 25 kg. Wymagane jest zachowanie bezpiecznej odległości między dronem a innymi osobami, zwierzętami oraz statkami powietrznymi.
Kategoria certyfikowana – umożliwia latanie nad zgromadzeniami ludzi i w pobliżu działań ratowniczych, oraz transport osób lub materiałów niebezpiecznych.
Kategoria szczególna – znajduje się pomiędzy tymi kategoriami. Ta wymagająca specjalnego zezwolenia właściwego organu państwa członkowskiego Unii Europejskiej (w przypadku Polski: Urzędu Lotnictwa Cywilnego).
Kategoria szczególna
Jeżeli operacja:
- nie może być realizowana w ramach kategorii otwartej,
- nie podlega pod krajowy scenariusz standardowy opublikowany przez Prezesa Urzędu Lotnictwa Cywilnego,
- podlega pod standardowy scenariusz opublikowany przez EASA (obowiązuje od 2 grudnia 2021 r.),
- wykracza poza możliwość przeprowadzania skróconej analizy ryzyka – PDRA,
- nie kwalifikuje się do kategorii certyfikowanej,
- nie podlega konkretnemu zakazowi wydanemu przez Urząd Lotnictwa Cywilnego,
…wówczas niezbędne jest przeprowadzenie analizy ryzyka, a następnie wymagane jest złożenie wniosku do Urzędu Lotnictwa Cywilnego o zezwolenie na wykonanie operacji bezzałogowym statkiem powietrznym w kategorii szczególnej.
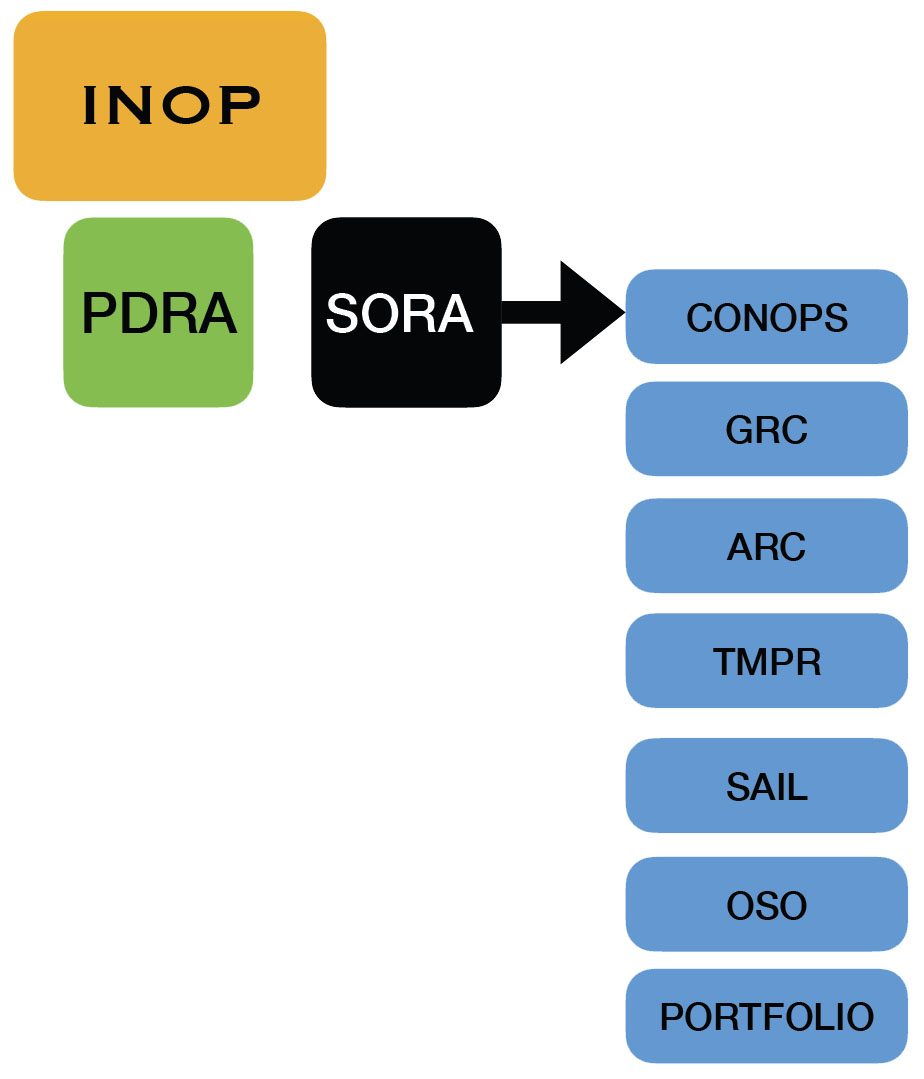
Analiza ryzyka SORA – można podzielić na pięć konkretnych obszarów:
- ConOps’ów – The Concept of Operations czyli opisu koncepcji operacji, miejsca, czasu, sposobu, załogi, szkolenia itp. oraz danych technicznych.
- GRC – Determining the Ground Risk Class czyli ocenie ryzyka związanego z uderzeniem BSP w ziemię czyli skutkami takiego uderzenia i wynikającego z niego zagrożenia dla osób postronnych
- ARC – Determining the Air Risk Class czyli ocenie ryzyka związanego ze zderzeniem z załogowym statkiem powietrznym i jego konsekwencjami.
- SAIL – Specific Assurance and Integrity Levels dotyczy wyznaczenia na podstawie powyższych puntów ryzyk poziomu SAIL czyli określonego poziomu integralności i zapewnienia bezpieczeństwa oraz
- OSO – Operational Safety Objectives czyli celów bezpieczeństwa na poziomie operacyjnym, wymagań jakie powinien spełnić operator dla danej misji. Dodatkowo pod uwagę bierze się obszar przyległy.
- Podsumowanie – portfolio bezpieczeństwa.
Ocena ryzyka związanego z operacjami dla operatorów dronów
Specyficzna Ocena Ryzyka Operacyjnego (#SORA) została opracowana przez JARUS (Wspólne Organy ds. Tworzenia Przepisów na Bezzałogowe Systemy) w celu zapewnienia operatorom dronów metodologii oceny ryzyka wymaganej do ubiegania się o zezwolenie na eksploatację Bezzałogowego Systemu Statków Powietrznych (#UAS) w kategorii szczególnej.
SORA proponuje bariery ryzyka, aby zapobiec wymknięciu się operacji spod kontroli i zapewnia bariery szkód w przypadku, gdy operacja wymknie się spod kontroli (np. plan reagowania kryzysowego). Proces SORA rozpoczyna się od zdefiniowania przez operatora wolumenu operacyjnego, w którym odbywa się operacja drona. Ta objętość operacyjna jest związana z przylegającą do niej przestrzenią powietrzną i otaczającym ją obszarem na ziemi. SORA obejmuje zarówno Model Ryzyka Naziemnego, jak i Model Ryzyka Powietrznego w celu określenia ryzyka dla otaczającego obszaru i przyległej przestrzeni powietrznej oraz zaproponowania środków łagodzących, które mogą zmniejszyć to ryzyko.

Koncepcja Operacji (ConOps)
Pierwszym krokiem w procesie SORA jest opisanie Concept of Operations (#ConOps) dla operacji drona, którą chcesz przeprowadzić. ConOps wymaga od Ciebie zebrania i dostarczenia wystarczających informacji technicznych, operacyjnych i ludzkich związanych z zamierzonym użyciem UAS. ConOps powinien być nie tylko opisem Twojej działalności, ale także zapewniać wgląd w kulturę bezpieczeństwa operacyjnego w organizacji.
Zasadniczo będziesz musiał opisać kto, co i gdzie jest operacja, którą zamierzasz przeprowadzić. Do tego będziesz potrzebować informacji o dronie i sprzęcie pomocniczym, który będzie używany, będziesz musiał wiedzieć, kto będzie pilotował drona (i jakie są jego kwalifikacje), w jaki sposób organizacja zadba o to, aby operacja była prowadzona bezpiecznie i miejsce, w którym operacja będzie miała miejsce (np. klasyfikacja przestrzeni powietrznej i obszar, który będzie przelatywał).

Określanie klasy ryzyka naziemnego (GRC)
Ryzyko naziemne UAS
odnosi się do nieograniczonego ryzyka uderzenia osoby przez drona
(w przypadku utraty kontroli) i jest reprezentowane w SORA
przez jedenaście klas ryzyka naziemnego (#GRC). Początkowy GRC pochodzi
wyłącznie z wymiarów
i energii kinetycznej drona, rodzaju operacji (#VLOS lub #BVLOS)
i scenariusza operacyjnego (operacje na niezaludnionym lub
zaludnionym obszarze, jeśli obszar jest kontrolowany lub jeśli obszar obejmuje
zgromadzenie ludzi).
Nieograniczone ryzyko uderzenia osoby przez UAS można kontrolować i zmniejszać za pomocą środków łagodzących. Można to zrobić na przykład poprzez wprowadzenie skutecznego planu reagowania kryzysowego (#ERP). Możliwe jest również zmniejszenie GRC poprzez ograniczenie wpływu uderzenia drona na ziemię poprzez zainstalowanie spadochronu ratunkowego. Trzecią opcją jest posiadanie skutecznych zabezpieczeń technicznych (np. aktywnej geofencing).
Każde ograniczenie ryzyka (lub jego brak) zapewnia czynnik (od +1 do -4), który można dodać do początkowego GRC, aby określić ostateczną klasę ryzyka gruntu. Po określeniu ostatecznego GRC następnym krokiem jest przyjrzenie się ryzyku lotniczemu dla operacji.
Określanie klasy ryzyka
lotniczego (ARC)
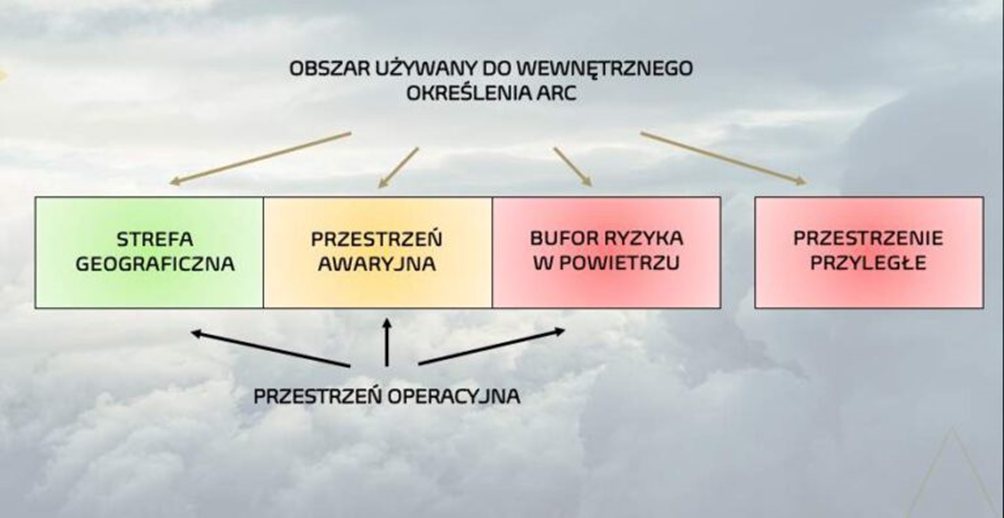
Klasa ryzyka lotniczego (#ARC) to uogólniona jakościowa klasyfikacja szybkości, z jaką dron napotkałby załogowy statek powietrzny w typowej cywilnej przestrzeni powietrznej. Zapewnia wstępną informację o ryzyku kolizji w przestrzeni powietrznej przed zastosowaniem środków łagodzących. ARC można znaleźć, odpowiadając na pytania z diagramu SORA dotyczące wysokości operacji, czy operacja odbywa się w kontrolowanej lub niekontrolowanej przestrzeni powietrznej, czy operacja ma miejsce w pobliżu lotniska i czy obszary miejskie lub wiejskie są przepełnione.
Schemat blokowy pokaże, jaki jest początkowy ARC (A – D) dla zamierzonej operacji. Jednakże ARC jest klasyfikacją uogólnioną, więc operator może uznać, że kwalifikacja jest zbyt wysoka dla warunków mieszczących się w zamierzonej objętości operacyjnej. W takim przypadku możesz zastosować strategiczne i taktyczne środki łagodzące, aby obniżyć ARC.
Łagodzenie strategiczne zazwyczaj składa się z procedur i ograniczeń operacyjnych mających na celu zmniejszenie ryzyka poprzez zmniejszenie liczby napotkanych dronów lub czasu ekspozycji przed startem. Mitygacje strategiczne dzielą się na mitygacje, które mogą być kontrolowane przez operatora (łagodzenie strategiczne przez ograniczenia operacyjne) i te, które nie mogą (łagodzenie strategiczne przez struktury i reguły).
Łagodzenie taktyczne zazwyczaj składa się z łagodzenia, które stosuje się po starcie i przybiera formę „łagodzącej pętli sprzężenia zwrotnego”. Łagodząca pętla sprzężenia zwrotnego to dynamiczny system stosowany w celu zmniejszenia częstości kolizji poprzez ciągłe modyfikowanie geometrii i dynamiki samolotów będących w konflikcie w przestrzeni powietrznej, w oparciu o zaktualizowane informacje o konfliktach statków powietrznych, takie jak alert o ruchu lotniczym (#ATC) i unikanie kolizji system (#TCAS), zarządzanie ruchem bezzałogowym (#UTM oraz Zobacz i Unikaj (VLOS).
Po zastosowaniu łagodzenia strategicznego i taktycznego można określić ostateczny ARC. Na podstawie ostatecznych celów ARC można utworzyć, aby zapobiec naruszeniu sąsiedniej przestrzeni powietrznej obok objętości operacyjnej. Końcowy ARC w połączeniu z ostatecznym GRC określi również szczegółowe poziomy pewności i integralności, na podstawie których tworzone są cele bezpieczeństwa operacyjnego.
Czym są SAIL i OSO?
Określone poziomy zapewnienia i integralności (#SAIL) to wybrany parametr w metodologii SORA w celu konsolidacji analizy ryzyka naziemnego i lotniczego. Poziom ufności reprezentowany przez SAIL nie jest ilościowy, ale odpowiada celom, których należy przestrzegać, opisom działań, które mogą wspierać zgodność z tymi celami oraz dowodom wskazującym, że cele zostały osiągnięte.
Na podstawie SAIL (poziomy I – VI) określane są Cele Bezpieczeństwa Operacyjnego (#OSO) dla barier i środków łagodzących różne zagrożenia, takie jak problem techniczny z UAS, pogorszenie zewnętrznych systemów wsparcia, błędy ludzkie i niekorzystne warunki operacyjne. Te OSO zasadniczo opisują wymagania dotyczące organizacji operatorów, drona i pilota.
Ponieważ wymagania pilota będą ustalane na podstawie posiadanej wiedzy i umiejętności. Można je uzyskać, przechodząc odpowiednie teoretyczne i praktyczne szkolenie z drona. Posiadanie odpowiedniego drona i sprzętu ma kluczowe znaczenie dla prowadzenia bezpiecznej operacji, OSO opisuje również wymagania dotyczące oceny technicznej drona, sprzętu i obsługi. Sama organizacja potrzebuje instrukcji operacyjnej zgodnej z SORA, aby mieć odpowiednie procedury, aby bezpiecznie i skutecznie wykonywać operacje dronów.
Pisanie instrukcji obsługi zgodnej z SORA
Profesjonalna
instrukcja obsługi jest niezbędna do skonfigurowania bezpiecznej
i wydajnej pracy drona. W AirHub pisaliśmy instrukcje obsługi dla
wielu różnych organizacji z różnych branż. I chociaż każda
organizacja i działanie dronów są inne,
zidentyfikowaliśmy szereg potrzebnych elementów instrukcji
obsługi zgodnej z SORA.
Profesjonalna instrukcja obsługi jest niezbędna do skonfigurowania
bezpiecznej i wydajnej pracy drona.
Pierwszym wymogiem jest upewnienie się, że podręcznik ma odpowiednią
strukturę, aby wyraźnie odróżnić informacje ogólne
od procedur operacyjnych i innych rozdziałów. W AirHub używamy do tego formatu zaczerpniętego
z tradycyjnych podręczników lotniczych.
Ważne jest również, aby
jasno opisać organizację Twojej operacji lotniczej i przydzielone
obowiązki. Trzecim wymogiem jest dostarczenie wystarczającej ilości informacji
technicznych o dronach, sprzęcie i usługach wykorzystywanych
do obsługi i konserwacji, które mają
do niego zastosowanie.
Rdzeniem instrukcji obsługi będą procedury, które muszą być stosowane przez personel. Bardzo ważne jest opracowanie jasnych i łatwych w użyciu standardowych procedur operacyjnych (#SOP) dla wszystkich działań, od planowania lotu do przetwarzania danych po locie. Będziesz musiał upewnić się, że wszystkie środki łagodzące wynikające z twoich analiz SORA są włączone do twoich normalnych, nienormalnych i awaryjnych procedur.
Ostatnim wymogiem jest dostarczenie personelowi całej dokumentacji potrzebnej do wykonania misji. Upewnij się, że mają łatwy dostęp do wszystkich list kontrolnych, formularzy itp. Profesjonalny system zarządzania operacjami dronów pozwoli Ci zaoszczędzić dużo czasu i pieniędzy.
 Platforma e-learningowa AVIACOM
Platforma e-learningowa AVIACOM